
南京帝淮耐輻照4搖桿動力機械臂遙控器說明
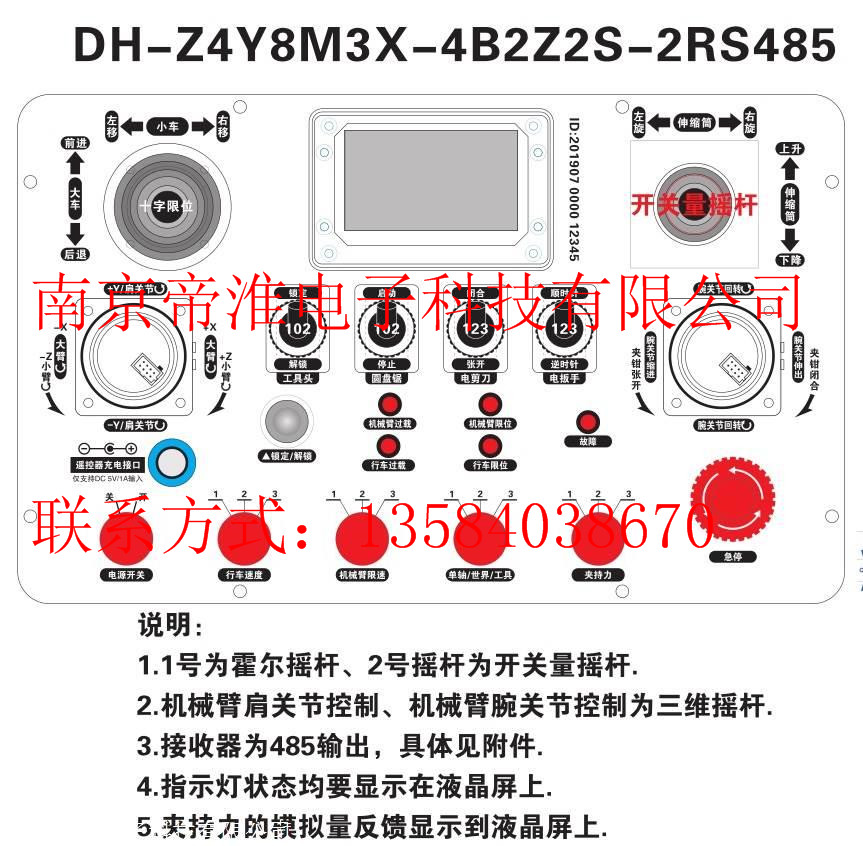
4搖桿耐輻照動力機械臂無線遙控器,本次4搖桿工業無線遙控器非標定制型號DH-Z4Y8M3X/4B2Z2S/2RS485(AC220V/100米/RS485/Moudbus協議/雙向反饋顯示)!
整套包含1臺發射器+1臺接收器,遙控距離按照100米提供。接收器端設計為RS485輸出,與被控端PLC之RS485接口以Moudbus協議通信。
發射器端按鈕布局及功能說明
1)2個二維搖桿,1號用于控制大車前后小車左右,為無極調速控制,具備X軸和Y軸坐標平面。2號用于控制伸縮筒升降及左右回轉,為4方向開關量控制,對應4路自復位模式開關量信號即為4路定值自復位模式數字信號輸出。
萬向無極,360度角均可執行,前后推動控制Y軸方向直線行走,左右推動控制X軸直線運行,且推動的幅度越大速度越快。搖桿具備X軸和Y軸坐標平面控制方式,設定Y軸方向直線推動正負5度角以內均視為直線推動的目的,只有偏離超過5度角時才視為需要執行2個坐標軸動作的聯動操作,X軸方向推動時同理。另設定搖桿垂直于坐標平面7.5度角時開始啟動,7.5度角以內視為死區,避免稍微晃動就出現誤動作的可能性。
搖桿無極調速控制過程,對應連續變化的數字信號輸出。
行車運動搖桿(左上):
2通道4方向模擬量比例搖桿,模擬量范圍為0-1000,絲印名稱:向上為“大車前進”,向下為“大車后退”,向左為“小車左移”,向右為“小車右移”;
伸縮筒運動搖桿(右上):
2通道4方向開關量搖桿,絲印名稱:向上為“伸縮筒上升”,向下為“伸縮筒下降”,向左為“伸縮筒左旋”,向右為“伸縮筒右旋”;
2)布局2個三維度搖桿,1號用于控制腕關節左右回轉、伸縮、夾緊松開;2號控制肩關節回轉、大臂伸縮、小臂伸縮;兩者均為頂部自帶旋鈕,可以順時針或逆時針轉動,自復位模式。3個維度,均為模擬量輸出控制。
機械臂運動搖桿(左下):
3通道6方向模擬量比例搖桿,模擬量范圍為0-1000,絲印名稱:向上為“肩關節?”,向下為“肩關節?”,向左為“大臂?”,向右為“大臂?”,逆時針為“小臂?”,順時針為“小臂?”;
機械臂運動搖桿(右下):
3通道6方向模擬量比例搖桿,模擬量范圍為0-1000,絲印名稱:向上為“+Y/腕關節回轉?”,向下為“-Y/腕關節回轉?”,向左為“-X/腕關節縮進”,向右為“+X/腕關節伸出”,逆時針為“-Z/夾鉗張開”,順時針為“+Z/夾鉗閉合”;
3)布局2兩位自鎖保持模式扭子開關,均為前推和后推2個位置,分別用于“工具頭鎖定/解鎖”控制、“圓盤鋸啟停”控制,對應1路定值保持模式數字信號輸出;
工具頭鎖定按鈕:
自保持扭子開關,絲印名稱:向上為“工具頭鎖定”,向下為“工具頭解鎖”;
圓盤鋸啟停按鈕:
自保持扭子開關,絲印名稱:向上為“圓盤鋸啟動”,向下為“圓盤鋸停止”;
4)2個三位自復位扭子開關,分別用于“剪刀開閉”、“扳手正反”,每個扭子開關對應接收器端2路自復位模式定值數字信號輸出;
剪刀控制旋鈕:
三檔自復位扭子開關,絲印名稱:向上為“剪刀閉合”,向下為“剪刀張開”;
扳手控制旋鈕:
三檔自復位扭子開關,絲印名稱:向上為“順時針?”,向下為“逆時針?”;
5)4個三檔位調速旋鈕,用于針對4個模擬量搖桿控制速度的限制,分分為3個段落:1檔位、2檔位、3檔位,將搖桿輸出的行程模擬量調速值分成3段。
行車速度調節旋鈕:
三檔自鎖旋鈕,絲印名稱:行車速度,檔位從左至右為“1”、“2”、“3”;
機械臂限速旋鈕:
三檔自鎖旋鈕,絲印名稱:機械臂限速,檔位從左至右為“1”、“2”、“3”;
機械臂坐標切換旋鈕:
三檔自鎖旋鈕,絲印名稱:單軸/世界/工具,檔位從左至右為“1”、“2”、“3”;
夾持力調節旋鈕:
三檔自鎖旋鈕,絲印名稱:夾持力,檔位從左至右為“1”、“2”、“3”;
6)顯示屏:
需顯示的開關量信號:故障、行車限位、行車過載、機械臂限位、機械臂過載,對應文字或燈;需顯示的模擬量信號:夾持力,按模擬量數據范圍對應顯示0%~100%;
7)“鎖定/解鎖”按鈕1個,啟動+急停蘑菇頭旋鈕。
